4 Axis Stamping Robot No ka Mīkini Paʻi



Hoʻolauna Huahana
I ka ʻike ʻana i ke koi maoli no ka hoʻomaikaʻi ʻana a me ka hoʻololi ʻana o ka ʻoihana stamping, ua hoʻolālā ʻia a hoʻomohala ʻia kahi loiloi kiʻekiʻe a me ka mana maʻalahi 4-Axis stamping handling robot.
ʻEhā axis stamping robot hoʻohana i ʻehā axis design, compact shape, liʻiliʻi liʻiliʻi, light weight, hoʻohana nui ʻia i ka welding argon arc, palletizing, handling, stamping a me nā māla ʻē aʻe, hiki ke hoʻopau i ka paʻa paʻa, wili pololei. Hiki i ka ʻehā axis punching manipulator ke hana maʻalahi i ka hana stamping i kahi wahi liʻiliʻi, a maʻalahi a maʻalahi hoʻi e hoʻokomo a hoʻopololei.
Nā ʻāpana kumu
Nā ʻāpana Kiʻekiʻe Kina a pau
Servo Motor
ʻO ka hōʻailona o ka mīkini servo ʻo Ruking, kahi hōʻailona Kina me nā mea maikaʻi o ka hopena wikiwiki, ka nui o ka torque i ka inertia ratio o ka hoʻomaka ʻana a me nā mea ʻē aʻe. Hiki iā ia ke pale i nā kūlana hana koʻikoʻi e hoʻokō pinepine i mua a i hope i ka wikiwiki a me ka hana deceleration a hiki ke pale i nā manawa he nui i ka manawa pōkole.
LNC MANA HOOKO
Hoʻokomo ʻo Yooheart robot i ka papahana aʻo. He maʻalahi a maʻalahi a maʻalahi i ka hana. Kākoʻo ʻo Yooheart robot i nā polokalamu mamao, hiki ke hoʻohana ʻia i nā ʻano papahana paʻakikī.
KINO ROBOT
Hoʻohana ke kino i ke kaʻina hana hoʻoheheʻe make, me ka hoʻohana ʻana i ka lua mold e hoʻopili ai i ke kaomi kiʻekiʻe i ka hoʻoheheʻe ʻana me ka hoʻoheheʻe ʻana, ke kino e hana ana i ke kiʻekiʻe kiʻekiʻe, ikaika rigidity, ʻoi aku ka māmā o kona kaumaha.
Hōʻike Hōʻikeʻike
Kiekie Kiekie
Pane hana wikiwiki
A ke alakaʻi nei ka pae
ma ka aina
Maʻalahi i ka hoʻolālā
Maʻalahi e mālama
ʻoi aku ka maikaʻi o ke kumukūʻai
ʻO ka wikiwiki kiʻekiʻe a me ke kūpaʻa
Ala pololei
Nā hāʻina Stamping kūpono
Palena Lopako
| Papahana | Hōʻike | Papahana | Hōʻike | Axis | Launa neʻe | Ka māmā māmā | Hollow Dia |
| Axis | 4 | Mahana | 0 ℃-45 ℃ | J1 | ±170º | 190º/s | —— |
| Ka hiki | 3.7KVA | Ka haʻahaʻa | 20-80%RH(ʻAʻohe haʻahaʻa) | J2 | +10º~+125º | 120º/s | —— |
| Kaumaha | 170KG | Haʻalulu | Ma lalo o 4.9M/S ² | J3 | +10º~-95º | 120º/s | —— |
| Uku nui | 10KG | ʻO nā mea ʻē aʻe | ʻAʻohe kinoea a me nā wai e hiki ke hoʻā a ʻino, e mālama i nā kumu leo uila | J4 | ±360º | 200º/s | —— |
| Kiko o ka hana | 140CM | Hiki hou | ±0.08mm | pae IP | IP65 | Hoʻokomo | Ka honua |
Hoʻohana Robot
Hot extrusion huahana hoouka a unloading
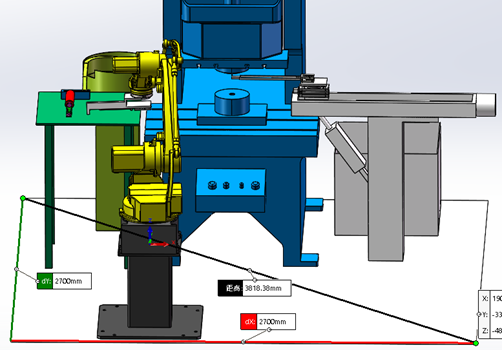
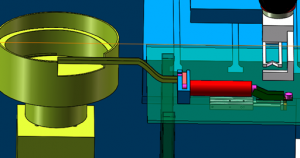
ʻO kēia papahana no ka hana ʻana i ke keleawe keleawe. ʻO ke kaʻina hana ʻulaʻula he hana extrusion wela. I ka wā ʻulaʻula kuʻi ʻana, ua hoʻomehana ʻia ka mea metala i kahi mahana a hoʻokomo ʻia i loko o ka mold preheated. Ma hope o ka neʻe ʻana o ka mīkini paʻi i hoʻokahi manawa, ua hoʻoheheʻe ʻia ka mea metala no ka loaʻa ʻana o ka nui i makemake ʻia, ke ʻano a me nā waiwai mechanical maikaʻi o nā ʻāpana stamping. Hoʻohana ka mea kūʻai aku iā Yooheart 4-axis handling robot e hoʻouka a wehe i ka mea hana metala ʻulaʻula
ʻIkepili Hoʻonā Hoʻohui
Aia ka papahana me kahi paʻi kuʻi, Yunhua 4-axis 10kg robot, nā mea hana hoʻonohonoho lua, nā pahu pahu pahu pahu a pēlā aku. ʻO nā ʻikepili i ʻike ʻia e like me ka manawa kuʻi, ka haʻahaʻa helu a me ke kūlana hana aia nā mea āpau i ka pae helu helu o HY1010B-140.


Kaʻina hana Overview
ʻO ka hānai lima no ka hoist ▶ hānai pā haʻalulu ▶ Ke hoʻonoho ʻana i ka mea hānai ma mua o ka hoʻomehana ʻana ▶ ka hoʻomehana ʻana o ka paipu o kēia manawa ▶ ka hoʻonohonoho ʻana i ke kūlana kiʻekiʻe ▶ hoʻopaʻa lopako ▶ kaomi punch ▶ ka hoʻokuʻu ʻana o ka mea hānai pahu.
Ka hōʻuluʻulu manaʻo o ka hana ʻana a me ka hoʻonohonoho ʻana i ka mea hana
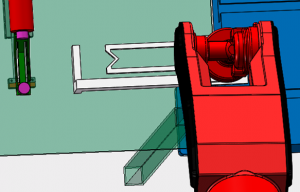
E hānai lima i ka pā vibration ▶ ʻO ka pā vibration ka lako waiwai no ka paipu hoʻomehana eddy o kēia manawa ▶ ʻO ka mea hoʻonoho kiʻekiʻe he robot clamp positioning.
Ka nānā ʻana o ka hana ʻana o ka mea hana pipili
Na ka lopako e hoʻopaʻa i nā mea keleawe i hoʻonoho ʻia ▶ no ka hana ʻana
Mahope o ke kuai ana
Loaʻa iā mākou kahi lawelawe ma hope o ka lawelawe e kōkua iā ʻoe e aʻo i ka hana ʻoiai inā ʻaʻole ʻoe i hoʻohana i nā robots ʻoihana a hoʻoponopono i nā pilikia i kāu manawa hoʻohana.
ʻO ka mea mua, e hāʻawi mākou i nā manual pili e kōkua iā ʻoe e hoʻomaopopo i kekahi ʻike robot.
ʻO ka lua, e hāʻawi mākou i nā wikiō aʻo. Hiki iā ʻoe ke hahai i kēia mau wikiō i kēlā me kēia ʻanuʻu mai ka wili, ka polokalamu maʻalahi i ka hoʻopau ʻana i nā papahana paʻakikī. ʻO ia ke ala maikaʻi loa e kōkua iā ʻoe ma lalo o ke kūlana covid.
ʻO ka mea hope akā ʻaʻole ka mea liʻiliʻi, e hāʻawi mākou i ka lawelawe pūnaewele me nā ʻenehana ʻoi aku ma mua o 20. Inā he nīnau kāu, hiki iā ʻoe ke hoʻokaʻaʻike mai iā mākou i kēlā me kēia manawa a e kōkua koke mākou iā ʻoe.


RFQ
N. He palekana anei keia no na limahana?
A. ʻoiaʻiʻo, ʻo kekahi o nā mea maikaʻi o ka hoʻohana ʻana i ka robot no ke koho ʻana a me kahi e pale ai i nā limahana mai nā ʻeha. Hiki i kekahi mea hana ke lawelawe i nā ʻāpana 5 ~ 6 CNC mīkini.
Q. he aha ke ʻano o ka huahana hiki ke hoʻohana i ka hoʻouka ʻana a me ka wehe ʻana i ka robot?
A. Hiki ke hoʻokomo ʻia kēlā me kēia mea hoʻoili mīkini robotic me nā mea hana hope-o-lima kūpono i kūpono me kāu mīkini a me kāu huahana. He pololei loa lākou a loaʻa iā lākou ka dexterity e mālama i ka ʻāpana me ka mālama.
N. Hoʻokahi wale nō hopena o nā mea hana lima hiki ke hoʻohana no ka hoʻouka ʻana a me ka wehe ʻana i ka robot?
A. Hiki i ka lima robot Industrial ke hoʻololi i ka papahana a me ka gripper clamp, nā hoʻololi wikiwiki i ka hale kūʻai akamai, ka wikiwiki debugging, e hoʻopau i ka pono o nā limahana akā no ka manawa hoʻomaʻamaʻa, hiki ke hoʻokomo koke i ka hana.
Q. aia kekahi pono ʻē aʻe o ka hoʻouka ʻana a me ka wehe ʻana i ka lopako?
A. E hoʻomaikaʻi i ka maikaʻi o ka workpiece Nā ʻano: robot automated production lines, mai ka hānai ʻana, clamping, ʻoki loa e nā robots, e hōʻemi i nā loulou waena, ʻoi aku ka maikaʻi o ka hapa, ʻoi aku ka nani o ka ʻili.
Q. Hiki iā ʻoe ke hāʻawi i nā hāʻina piha no ka hoʻouka ʻana a me ka wehe ʻana i ka robot?
A. ʻoiaʻiʻo, hiki iā mākou ke hana pū me kā mākou mea kūʻai aku.