
8 Axis Robotic Welding Workstation me ʻElua Positioner



Lopako Welding Workstation me ʻElua Kūlana

Hoʻolauna Huahana
Pehea e hoʻonui ai i ka pono o ka hana robot? ʻO ka hoʻohui ʻana i hoʻokahi papa hana he ala kūpono. E koho ka mea hana i ka ʻāpana hana ma ka papa hana hoʻokahi a ʻo ka lopako e wili ma ka papa hana ʻē aʻe i hiki i ka lopako ke wili mau i ka ʻāpana hana.
PALAPALA HUA & NUI
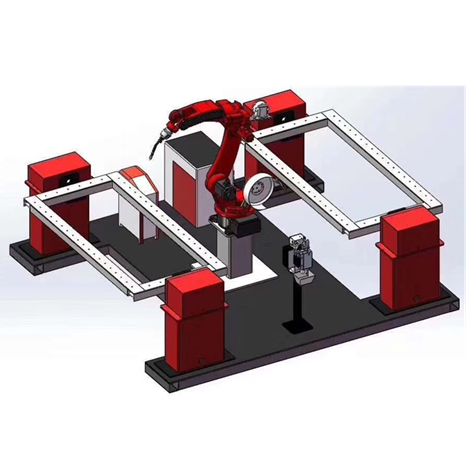
ʻO kā mākou 8 Axis robotic welding workstation me ʻelua positioners kekahi o ka hana maʻamau. Hiki i ka axis waho hou ke hui pū me ka robot i hiki i ka robot ke hoʻopau i kekahi noi paʻakikī. Hiki ke kapa ʻia kēia mau kūlana ʻelua i ka papa hana a hiki ke hoʻomalu ʻia e ka pahu mana mamao. Ke hoʻopau ka mea hana i ka hana hoʻoponopono a kaomi i ka pahu mana mamao. E hele ʻo Robot i kēia weld table welding ma hope o ka pau ʻana o ka mea ma mua. Hiki iā mākou ke hoʻohui i ke kahua hoʻomaʻemaʻe kukui i mea kōkua no ka wili kukui.
Palapala noi

HELU 1
Hoʻolauna
8 Axis lopako hana hale hana
HELU 2
Hoʻolauna
Robot me ʻelua axis positioner


HELU 1
Hoʻolauna
Hana wiliwili unahi iʻa
HOOLAHA A ME KA HOOKAPU
Hiki i ka hui ʻo YOO HEART ke hāʻawi i nā mea kūʻai aku me nā huaʻōlelo like ʻole o ka lawe ʻana. Hiki i nā mea kūʻai ke koho i ke ala hoʻouna ma ke kai a i ʻole ma ka lewa e like me ka mea nui. Hiki i ka YOO HEART robot pahu pahu ke hoʻokō i ke koi o ka ukana kai a me ka ea. E hoʻomākaukau mākou i nā faila a pau e like me PL, ka palapala kumu, invoice a me nā faila ʻē aʻe. Aia kekahi limahana nona ka hana nui e hōʻoia i kēlā me kēia lopako hiki ke hāʻawi ʻia i ke awa o nā mea kūʻai aku me ka ʻole o ka pilikia i nā lā hana 20.



Ma hope o ke kūʻai aku
Pono nā mea kūʻai aku e ʻike maikaʻi iā YOO HEART robot ma mua o ke kūʻai ʻana. I ka manawa e loaʻa ai i nā mea kūʻai aku hoʻokahi robot YOO HEART, e loaʻa i kā lākou limahana 3-5 mau lā aʻo manuahi ma ka hale hana YOO HEART. E loaʻa kahi hui wechat a i ʻole hui whatsapp, ʻo kā mākou ʻenehana nona ke kuleana no ka lawelawe ma hope o ke kūʻai ʻana, uila, lako, lako polokalamu, etc.
FQA
Q1. He aha ka ʻokoʻa o ka positioner i hoʻomalu ʻia e ka plc a me ka ʻōnaehana mana.
A. ʻO ka pilikia nui inā hoʻomalu ʻia ka positioner e PLC, hiki iā ia ke neʻe wale mai ke kūlana a i ke kūlana ʻē aʻe, ʻaʻole hiki i ka lopako ke hui pū me ka positioner (synergy). ʻoiai e hoʻohana ana i ka ʻōnaehana mana, hiki iā ia ke hana pū me ka positioner. ʻOiaʻiʻo, loaʻa iā lākou nā pilikia ʻenehana like ʻole.
Q2. Pehea e hoʻohui ai i ka pākaukau hoʻoponopono hou?
A. I kēia manawa, loaʻa iā mākou 22input a me 22 output. Pono ʻoe e hāʻawi i nā hōʻailona i ka valve electromagnetic.
Q3. Loaʻa iā ʻoe kahi kahua hoʻomaʻemaʻe kukui ma kāu keʻena hana?
A. Loaʻa iā mākou ka lama kukui maʻemaʻe ma ke keʻena hana. He mea koho.
Q4. Pehea e hoʻohui ai i ke kahua hoʻomaʻemaʻe lama a pehea e hoʻohana ai?
A. E loaʻa iā ʻoe kahi manual no ke kahua hoʻomaʻemaʻe kukui. A pono ʻoe e hāʻawi i nā hōʻailona i ke kahua hoʻomaʻemaʻe kukui a e hana ia.
Q5. He aha ke ʻano o nā hōʻailona e pono ai ke kahua hoʻomaʻemaʻe lama?
A. Aia ma kahi o 4 mau hōʻailona e pono ai ke kahua hoʻomaʻemaʻe lama: ʻoki i nā hōʻailona uea, hōʻailona ʻaila ʻaila, hōʻailona hoʻomaʻemaʻe, a me nā hōʻailona hoʻonohonoho.



