He loulou koʻikoʻi ka hana ʻenehana i ka hoʻoikaika ʻana i ka hoʻokele waiwai a me ka nohona. I kēia manawa, ke hohonu nei ka noiʻi ʻana i nā mea hoʻoheheʻe maʻemaʻe a hoʻopaʻa ʻia, kahi e hoʻohana nui ʻia ai i ka hana ʻana o nā ʻano hana welding.
I ke kaʻina hana o ka 'akomi kuʻihao, naauao a me kikohoʻe kūpono mana o kuʻihao hui awāwa hewa i kekahi nui, ma keia kumu, no hoi i ka workpiece kūlana okoa, workpiece hui deviation a me na kumu e noonoo. No laila, he hana koʻikoʻi ka ʻenehana hoʻopaʻa ʻana i ka wiliwili laser i ke kaʻina hana kuʻi.
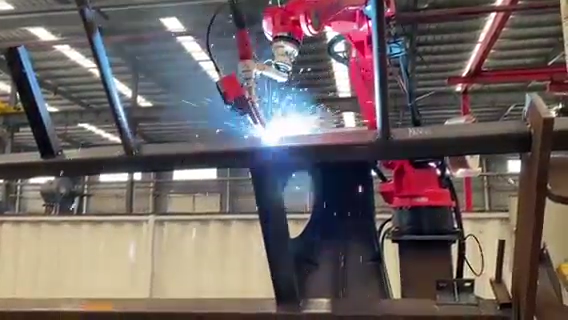
ʻO ka wili sima pahu kaʻa kaʻa kumu wili ʻehiku axis earth orbit ʻewalu axis rotation me ka laser wili
- He ʻokoʻa loa ke kūlana o ka mea hana
- Aia ka deviation ma ka pilina mea hana
- Pono ka pololei kuʻihao kiʻekiʻe
-Ka pōʻino wiliwili a me ka uahi
I kēia hihia, hoʻohana ʻia ʻo Yooheart intelligent robot HY1006A-145 no ka hoʻopaʻa ʻana me ka ʻōnaehana hoʻopaʻa ʻana i ka laser welding seam tracking system, nona ka maʻalahi, kūpaʻa a me ka hilinaʻi.
Ma mua o kēlā me kēia wili, nānā mua nā mea hana a hoʻopaʻa i ka hoʻonohonoho ʻana o ka seam welding ma o ka loaʻa ʻana o ka wili, a laila helu i ka coordinate offset e ka algorithm kūloko a hoʻokomo i nā ʻāpana hoʻohālikelike i ka manawa maoli e hoʻoponopono ai i ka deviation maoli i ka manawa, i mea e hōʻoia ai i ka sila a me ka pono o ka huahana ma hope o ka wili.
ʻO ke ʻano "ʻehā kiko'ī".
E like me ka mea i ike i na mea a pau, elua helu e hoʻoholo i ka pololei laina, akā, i ka workpiece anaina e hana i ka Angle, ka maʻamau algorithm hiki ole ke hoʻoholo i kona kūlana, keia mea e pono ai ka hoʻohana 'ana i ke ano o ka "intersection" i ka hora eha, elua laina intersecting produces ka intersection wahi, ka algorithm o ka kūikawā ma o ka hoʻoholo 'ana o ka ike eha mau helu i helu 'ia i ke kūlana o ka intersection point coordinate.

Pūnaehana hoʻopaʻa ʻana i ka humuhumu laser
Hoʻokumu nui ʻia ka ʻōnaehana hoʻopaʻa ʻana i ka laser welding seam me nā mea ʻike laser a me nā hopena nānā. Hoʻohana ʻia ka mea ʻike laser no ka loaʻa ʻana a me ka hana manawa maoli o ka ʻike wili wili, a mālama i ka kamaʻilio manawa maoli me nā robots ʻoihana. Mākaʻikaʻi terminal Nānā a hoʻonohonoho i nā mea ʻike. Loaʻa i ka ʻōnaehana nā hana o ka huli ʻana, ka nānā ʻana a me ka nānā ʻana ma mua o ka wili ʻana e hoʻokō i nā pono o ka wili naʻauao.
Manaʻo hana: Weld seam scanning, point cloud kiʻi kūpono, ka algorithm e hoʻomaopopo pololei i nā kiko hiʻona, a me ka ʻikepili manawa maoli o ka helu ʻana i nā hopena i hoʻouna ʻia i ka lopako, i nā ʻōlelo aʻoaʻo, hoʻololi a alakaʻi paha i ka hana lopako.
ʻO ka hoʻonā pā ʻāwili

ʻO ka hoʻoheheʻe ʻana i ka hoʻoheheʻe ʻana i ka puʻu ʻakomi puka pōʻai

Haʻina humuhumu pōʻai

Nā hāʻina tubeplate
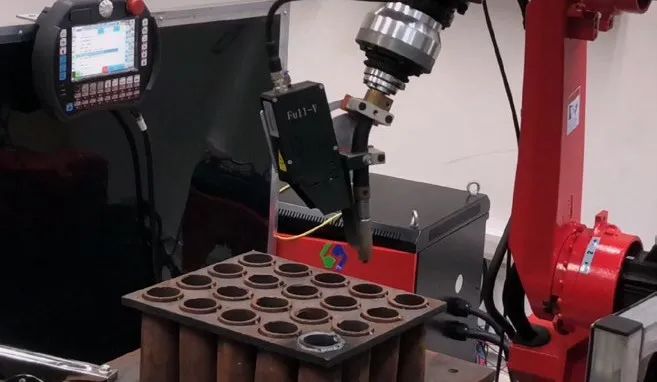
Hiki i ka Yunhua Intelligent ke hāʻawi i ka hoʻolaha wikiwiki, palekana a me ka maikaʻi o nā ʻōnaehana automation a me nā ʻōnaehana manawa maoli.
Ka manawa kau: Apr-09-2022



