Hoʻolauna
ʻO ka ʻoihana kaʻa ua lōʻihi ka paionia i ka hoʻohana ʻana i nā ʻenehana ʻokiʻoki e hoʻomaikaʻi i ka pono, pololei, a me ka scalability. Ma waena o kāna mau mea koʻikoʻi, ʻo ke kaʻa kaʻa - ka iwi kuamoʻo e hōʻoia i ka palekana, ka lōʻihi, a me ka hana. Ke piʻi aʻe nei nā koi no nā mea māmā, hana maʻamau, a me ka hana wikiwiki, ke huli nei nā mea hana i nā robots ʻoihana e hoʻololi i ka hana ʻana. Ke ʻimi nei kēia ʻatikala pehea e hoʻololi hou ai nā robotics i ka hana ʻana o nā kaʻa kaʻa, mai ka lawelawe ʻana i nā mea a hiki i ka wili a me ka hoʻokele maikaʻi ʻana, ʻoiai e kamaʻilio ana i nā pilikia a me nā ʻano o ka wā e hiki mai ana i kēia māhele ikaika.
Mahele 1: Ke Koʻikoʻi o nā Paʻa Kaʻa ma ka Hoʻolālā Kaʻa
ʻO nā papa kaʻa, i kapa pinepine ʻia he chassis, ke kumu no nā ʻōnaehana kaʻa āpau. Pono lākou e pale i ke koʻikoʻi nui, hoʻopaʻa i ke kaumaha o ke kaʻa a me nā mea e noho ana. Hoʻolālā ʻia nā papa o kēia wā me ka hoʻohana ʻana i nā mea holomua e like me ke kila ikaika kiʻekiʻe, nā alumini alumini, a me nā mea hoʻohui carbon fiber e kaulike i ka ikaika me ka hōʻemi kaumaha.
Eia nō naʻe, ʻo ka hana ʻana i kēia mau hale paʻakikī e koi i ka pololei loa. Hiki ke hoʻololi i ka palekana a me ka hana ʻana i nā mea liʻiliʻi liʻiliʻi i ka alignment welding a i ʻole ka hui ʻāpana. Paʻakikī nā kaʻina hana lima kuʻuna e hoʻokō i nā ʻae ʻana i koi ʻia e nā kūlana automotive o kēia lā, e hana ana i kahi koi koi no ka automation.
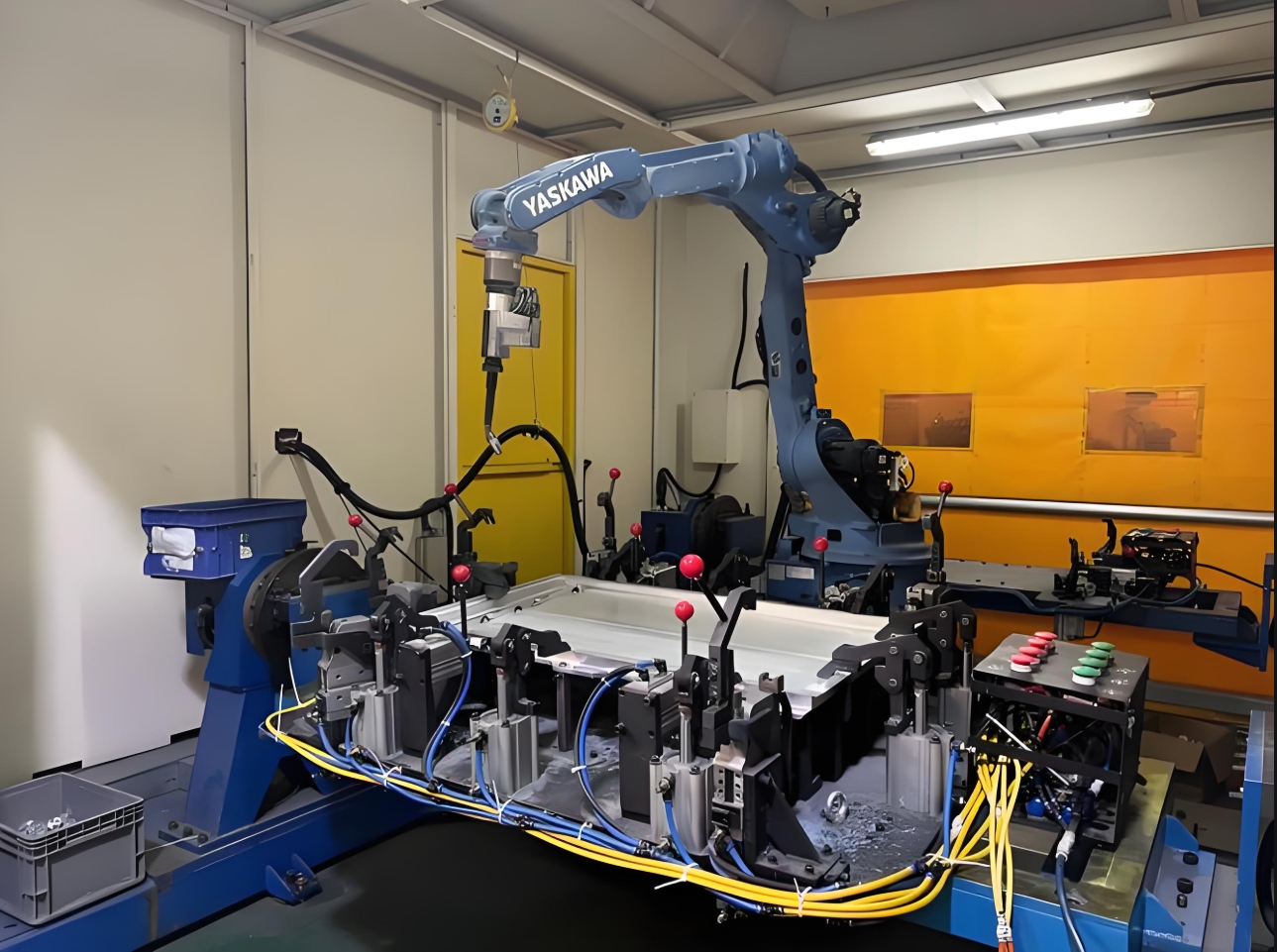
Mahele 2: Nā Lopako ʻOihana i ka hana ʻana i nā kiʻi: Nā noi nui
2.1 Ka Hoʻoponopono Mea a me ka Hoʻomākaukau Mea
Hoʻomaka ka hana ʻana i nā papa kaʻa me ka hoʻoili ʻana i nā mea maka. ʻOi aku ka maikaʻi o nā lopako ʻenehana me nā mea hoʻopaʻa kiʻekiʻe a me nā ʻōnaehana ʻike i ka lawelawe ʻana i nā ʻāpana metala nui, nā paipu, a me nā mea hana mua. ʻo kahi laʻana:
- Ka hoʻopololei ʻana i ka lau metala: ʻOki mua ʻia nā lopako a hana i nā ʻāpana kila a i ʻole alumini i loko o nā kaʻa kaʻa, nā lālā keʻa, a me nā pale me ka pololei sub-millimeter.
- Ka hoʻohana ʻana i nā mea hana: Mālama pono nā lopako hui (cobots) i nā mea māmā akā palupalu e like me ke kalapona kalapona, e hōʻemi ana i ka ʻōpala a me ka hewa kanaka.
2.2 Hoʻohui a me nā ʻenehana hui
Hoʻomau ka welding i ka hana robot-intensive loa i ka hana kiʻi. Hāʻawi nā ʻōnaehana hoʻoheheʻe robotic hou i ka kūlike like ʻole ma waena o nā tausani o nā wahi weld:
- wiliwili wahi kūʻē: Hana nā robots multi-axis i ka wiliwili wahi kiʻekiʻe ma nā papa kila, e hōʻoia ana i ka ikaika hui like.
- Hoʻopili laser: ʻO nā lopako pololei i hoʻolako ʻia me nā poʻo laser e hana i nā hui pū ʻole no nā papa alumini, e hōʻemi ana i ka distortion thermal.
- Hoʻopili paʻa: Hoʻopili nā lopako i nā mea hoʻopili paʻa i loko o nā ʻano paʻakikī e hoʻopaʻa i nā ʻāpana metala-composite hybrid, kahi hana ʻaneʻane hiki ʻole ke hana hou me ka lima.
Nānā Hiʻohiʻona: Ua hōʻemi ka mea hana kaʻa ʻEulopa i nā hemahema wili ma 72% ma hope o ka hoʻohana ʻana i nā ʻauwaʻa o nā robots 6-axis me ka hoʻoponopono ala kūpono, hiki ke hoʻoponopono i nā ʻāpana weld i ka manawa maoli ma muli o ka manaʻo o ka sensor.
2.3 Hui a me ka Hoohui
Hoʻohui ka hui ʻana i nā puʻu hoʻokuʻu ʻia, nā pale ʻenekini, a me nā mea palekana. Hoʻohālike nā lopako ʻelua-lima i ka dexterity kanaka e hoʻopaʻa i nā bolts, hoʻokomo i nā puʻupuʻu, a hoʻoponopono i nā subassemblies. ʻO nā ʻōnaehana alakaʻi ʻike e hōʻoia i ka hoʻonohonoho ʻana o nā ʻāpana i loko o ± 0.1 mm tolerances, koʻikoʻi no ka mālama ʻana i ka alignment drivetrain.
2.4 Hōʻoia maikaʻi a me Metrology
He mea nui ka nānā ʻana ma hope o ka hana ʻana no ka hoʻokō ʻana i nā lula palekana. Ke hana nei nā ʻōnaehana robotic i kēia manawa:
- 3D laser scanning: Hoʻopololei nā lopako i nā geometries kiʻi holoʻokoʻa no ka ʻike ʻana i ka warping a i ʻole ke ʻano kūpono ʻole.
- Ka ho'āʻo kani kani: Nānā i ka pono o ka weld me ka poino ole o ka ili.
- ʻIke hemahema i mana AI: Hoʻopili nā algorithms aʻo mīkini i nā meaʻai pahupaʻikiʻi e ʻike ai i nā micro-cracks a i ʻole ka uhi ʻana i nā like ʻole.

Mahele 3: Nā Pono o ka Robotic Automation ma Frame Production
3.1 Ka pololei a me ka hana hou
Hoʻopau nā lopako ʻoihana i ka ʻokoʻa kanaka. Hiki i ke kelepona hoʻoheheʻe robotic hoʻokahi ke hoʻomau i ka 0.02 mm ka hoʻihoʻi hou ʻana ma waena o 24/7 kaʻina hana, e hōʻoia ana i kēlā me kēia kiʻi e hoʻokō pono i nā kikoʻī hoʻolālā.
3.2 Hoʻonui i ka palekana o nā limahana
Ma ka hana ʻana i nā hana pōʻino e like me ka welding overhead a i ʻole ka hāpai kaumaha, ua hōʻike nā mea hana i kahi hōʻemi o 60% i nā ʻeha wahi hana e pili ana i ka hana ʻana.
3.3 Kūʻai kūpono
ʻOiai he mea nui nā hoʻopukapuka mua, hoʻemi nā robots i nā kumukūʻai lōʻihi ma o:
- 30–50% ʻoi aku ka wikiwiki o ka manawa pōʻai
- 20% haʻahaʻa haʻahaʻa
- 40% ho'ēmi i nā lilo hana hou
3.4 Scalability a me ka maʻalahi
Hiki i nā pūnaewele robotic modular ke hoʻonohonoho hou i nā laina hana no nā hoʻolālā kiʻi hou. No ka laʻana, hiki ke hoʻohui ʻia nā papa kaʻa uila (EV) me nā pā pākaukau i nā ʻōnaehana i loaʻa me ka liʻiliʻi loa.

Mahele 4: Ke lanakila ʻana i nā pilikia ma ka hana ʻana i nā pahu robotic
4.1 Nā pilikia pili waiwai
ʻO ka hoʻololi ʻana i nā papa hana lehulehu (e laʻa, nā huila kila-alumini) pono nā robots e lawelawe i nā ʻenehana hoʻohui like ʻole. Loaʻa nā hopena:
- ʻO nā poʻo hoʻoheheʻe Hybrid e hui pū ana i nā ʻenehana arc a me ka laser
- ʻO nā mea hoʻopaʻa lima no ka mālama ʻana i nā metala non-ferrous
4.2 Paʻi polokalamu
Hiki i ka polokalamu hoʻolālā robot offline (OLP) i kēia manawa ke ʻae i nā ʻenekini e hoʻohālikelike a hoʻopaʻa pono i nā kahe hana robotic ma ke kelepona, e hōʻemi ana i ka manawa hana a hiki i ka 80%.
4.3 Nā Pilikia Cybersecurity
Ke ulu nui nei ka hoʻokumu ʻana o ka frame ma o Industrial IoT, pono nā mea hana e hoʻokō i nā protocol kamaʻilio i hoʻopili ʻia a me nā mea hou firmware maʻamau e pale i nā pūnaewele robotic.
Mahele 5: ʻO ka wā e hiki mai ana o ka hana ʻana o ka Robotic Frame
5.1 Mea Hana Adaptive i alakaʻi ʻia e AI
E hoʻohana nā robots o ka hanauna hou i ka naʻauao artificial i:
- ʻO nā mea hana pono'ī-calibrate ma muli o ka mānoanoa mea
- E wānana a e uku no ka ʻaʻahu ʻana i nā mea hana
- E hoʻonui i ka ikehu i ka wā e koi nui ai
5.2 Hui Pū ʻia kanaka-Robot
E hana pū nā Cobots me nā hui i kaupalena ʻia me nā ʻenehana no ka hoʻoponopono ʻana i ka pahu hope, e hui pū ana i ka hoʻoholo kanaka me ka pololei robotic.
5.3 Hana Hoʻomau
E hana nui nā ʻōnaehana robotic i ka hoʻokō ʻana i ka hana circular:
- Wehe 'akomi o nā papa hope o ke ola no ka hana hou 'ana
- ʻO ka waiho ʻana o nā mea pono e hōʻemi i ka hoʻohana ʻana i nā mea maka
Ka hopena
ʻO ka hoʻohui ʻana o nā robots ʻoihana i loko o ka hana ʻana i nā kaʻa kaʻa e hōʻike ana ma mua o ka holomua ʻenehana - ʻo ia ka mea e hōʻike ai i kahi loli nui i ke ʻano o ke kūkulu ʻia ʻana o nā kaʻa. Ma ka hāʻawi ʻana i ka pololei like ʻole, ka pono, a me ka hiki ke hoʻololi ʻia, hāʻawi nā ʻōnaehana robotic i nā mea hana e hoʻokō i nā koi e ulu nei no nā kaʻa palekana, māmā, a ʻoi aku ka hoʻomau. Ke hoʻomau nei ʻo AI, nā ʻenehana kiʻekiʻe, a me nā ʻenehana ʻōmaʻomaʻo, ʻo ka synergy ma waena o nā robotics a me ka ʻenekinia automotive e alakaʻi i ka ʻoihana i nā pae o ka hana hou.
No nā ʻoihana loea i nā robotics ʻenehana, hāʻawi kēia hoʻololi i nā manawa nui e hui pū me nā mea hana kaʻa i ka wehewehe hou ʻana i ka wā e hiki mai ana o ka neʻe - hoʻokahi kiʻi i hana ʻia i ka manawa.
Helu Huaolelo: 1,480
Hua'ōlelo koʻikoʻi: Nā lopako kaʻa kaʻa, nā ʻōnaehana hoʻoheheʻe robotic, AI i ka hana ʻana, nā lopako hui pū, ka hana hoʻomau.
Nā Manaʻo SEO: E hoʻokomo i nā wehewehe meta e kuhikuhi ana i ka "automotive frame automation" a me "nā robots ʻoihana no nā chassis kaʻa." E hoʻohana i nā loulou i loko i nā noiʻi hihia pili a i ʻole nā ʻaoʻao huahana.
Ka manawa hoʻouna: Mar-26-2025



