
YH1165B-315 Lopako Hana Kaumaha no ka Palletizing Mea Hana Nui



Hoʻolauna
ʻO kaYH1165B-315he lopako ʻenehana 4-axis kiʻekiʻe i hoʻolālā ʻia no ka lawelawe ʻana i nā mea kaumaha a me nā noi palletizing. Hoʻolālā ʻia e lawelawe i nā mea hana nui a nui e like me nā pōhaku lepo, nā pahu aila, nā ʻeke, a me nā pahu, ua hui kēia robot i ka hiki ke hoʻouka ikaika, ka lōʻihi o ka hiki, a me ka pololei e hoʻomaikaʻi i ka pono i ka koi ʻana i nā kaiapuni ʻoihana. Me ka uku nui loa o165 kga me ka lima lima o3150 mm, ʻoi aku ka maikaʻi o ka YH1165B-315 i nā hiʻohiʻona e koi ana i nā hana wikiwiki, kūpaʻa, a me ka hana hou. ʻO kāna hoʻolālā modular e hōʻoia i ka hoʻonohonoho maʻalahi a me ka mālama ʻana, e hana ana i kahi hopena kūpono no nā ʻoihana e ʻimi nei i ka huahana a me ka hilinaʻi.

Caption: YH1165B-315 maikaʻi i ka palletizing ʻaila pahu i loko o kahi hale hana.
Nā mea nui
- Kaumaha Kaumaha
Hiki ke lawelawe i nā ukana a hiki i165 kg, Hoʻopiliʻia ka YH1165B-315 no nāʻoihanaʻoihana kaumaha. ʻO kāna mau hui i hoʻoikaika ʻia a me ka hoʻolālā mechanical optimized e hōʻoia i ka paʻa ma lalo o ka haʻahaʻa kiʻekiʻe. - Hoʻonui i ka hiki a me ka maʻalahi
Me a3150 mm ka lōʻihi limaa me ka neʻe ʻana o 4-axis, loaʻa ka robot i kahi laulā hana ākea, e uhi ana i nā wahi hana nui me ka mālama pono. Hoʻolālā ʻia ka pae neʻe P-point (mea hana kikowaena) no ka hoʻokō pono ʻana i nā hana hoʻopaʻa kū pololei a me ke alo. - Paʻa Kiʻekiʻe
Hiki i nā algorithms hoʻokele hoʻoneʻe kiʻekiʻe a me nā mīkini hui i hoʻopaʻa ʻia15–20% ʻoi aku ka wikiwiki o ka manawahoʻohālikelike ʻia me nā hiʻohiʻona mua. Mālama kēia hoʻomaikaʻi i ka hoʻokō ʻana i ka hana me ka ʻole e hōʻemi i ka pololei. - Mālama maʻalahi
ʻO nā ʻāpana modular o ka robot a me nā wili maʻalahi e hōʻemi i ka manawa haʻahaʻa i ka wā mālama. Hiki ke loaʻa maʻalahi nā ʻāpana koʻikoʻi, e hōʻemi ana i nā keʻakeʻa lawelawe. - Hana Paa
Hoʻokumu ʻia me nā mea hana ʻenehana, ʻo ka YH1165B-315 ke kūpaʻa i nā kaiapuni koʻikoʻi, me ka lepo, nā haʻalulu, a me nā loli wela.

Caption: YH1165B-315 maikaʻi palletizing ʻeke.
ʻIkepili ʻenehana
| ʻĀpana | Waiwai |
| Uku Uku | 165 kg (nui) |
| Ka lōʻihi lima | 3150 mm |
| Koʻi | 4-axis |
| Hiki hou | ±0.03 mm |
| Launa Neʻe (P-Point) | Lz: 500–1100 mm (kū pololei) |
| Lxy: 500–1100 mm (paepae) | |
| Hoʻonui wikiwiki | ʻOi aku ka wikiwiki o 15-20% ma mua o nā mea ma mua |
| Nā noi i manaʻo ʻia | Palletizing, forging, machining, hui |
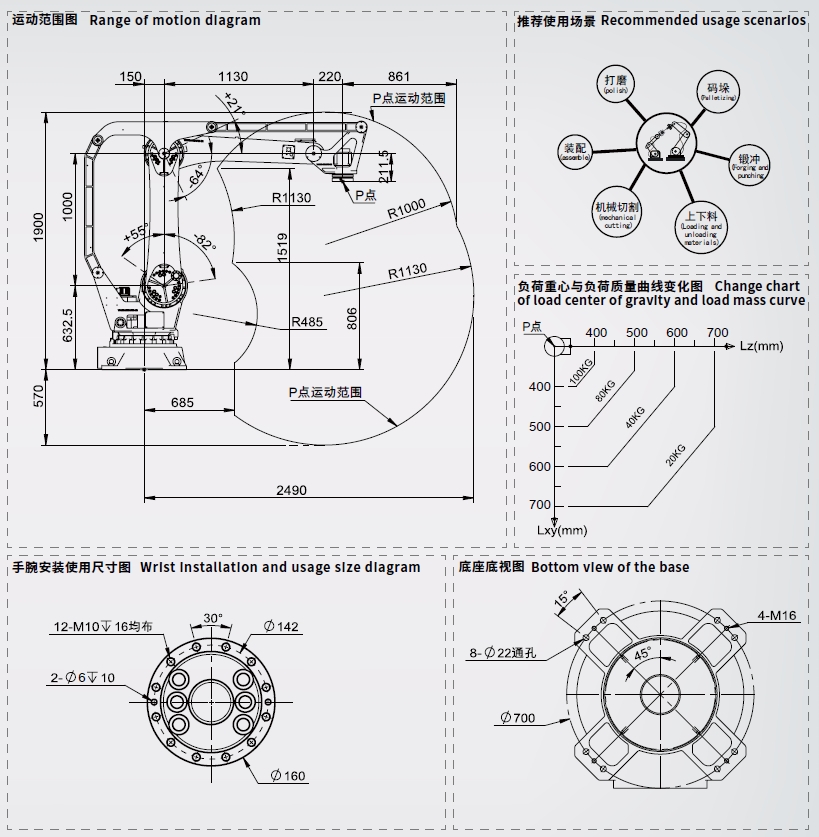
Manaʻo: P-point motion range kiʻi e hōʻike ana i ka uhi kū pololei (Lz) a me ke ākea (Lxy).
Nā noi
He mea maʻalahi ka YH1165B-315 ma nā ʻoihana e koi ana i ka lawelawe ʻana i nā mea kaumaha. Loaʻa nā hihia hoʻohana nui:
- Palletizing o ka waiwai nui
Hoʻopaʻa maikaʻi i nā pōhaku lepo, ʻeke, a i ʻole nā pahu i loko o nā hale kūʻai a i ʻole nā laina hana. ʻO ka lōʻihi o ka lōʻihi o ka lōʻihi a me ka hiki ke hoʻouka ʻia e hiki ke lawelawe i nā papa he nui me ka pololei. - Kuʻi a me ke kuʻi
E pale i nā kaiapuni kiʻekiʻe ma o ka lawe ʻana i nā mea metala kaumaha ma waena o nā mīkini paʻi a i ʻole nā mīkini kuʻi. - Mīkini a me ka Hui
E hoʻouka a hoʻokuʻu i nā ʻāpana nui ma nā mīkini CNC a i ʻole e hōʻuluʻulu i nā mea koʻikoʻi i ka hana kaʻa a me nā mīkini. - Ka Pahu a me ka Barela
E hoʻokiʻekiʻe a hoʻonoho i nā pahu aila, nā barela kemika, a i ʻole nā mea like ʻole.
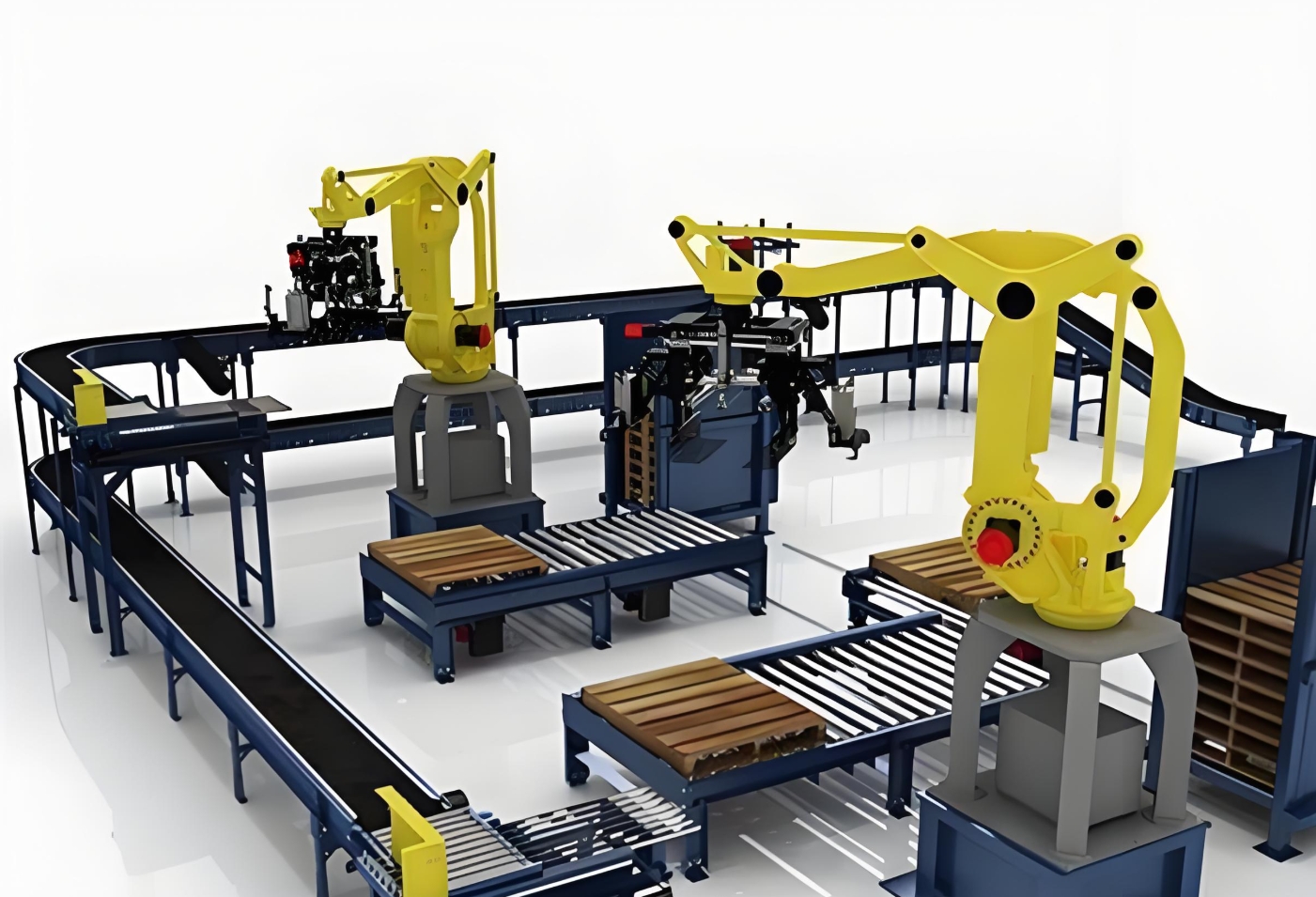
Caption: YH1165B-316 mālama i nā pahu i loko o kahi hale kūʻai logistic.
Hoʻonui i ka hana
ʻO nā hiʻohiʻona YH1165B-315 i hoʻonui ʻia:
- 15–20% ʻoi aku ka wikiwiki o ka manawama muli o ka hoʻonui ʻia ʻana o nā kaʻa servo a me nā algorithm neʻe.
- Hoʻomaikaʻi ʻia ka haʻalulu haʻalulu no nā hana maʻalahi.
- ʻO nā mea hoʻohana ikaika e hōʻemi ana i ka hoʻohana ʻana i ka mana a hiki i 10%.
No ke aha e koho ai iā YH1165B-315?
- Paʻa pono: Hoʻāʻo ʻia i nā hiʻohiʻona maoli me ka 10,000 mau hola o ka hana.
- Hoʻopilikino: ʻO nā grippers koho, nā mea ʻike, a me ka hoʻohui polokalamu no nā hana kikoʻī.
- Kākoʻo: Nā palapala ʻenehana piha a me ka lawelawe mea kūʻai aku 24/7.
Noi i ka 'ike hou aku
No ka kikoʻī kikoʻī kikoʻī kikoʻī kikowaena kikowaena o ka gravity palapala kiʻi, kumu hoʻonoho kiʻi kiʻi, a maʻamau hoʻoponopono, e kelepona i ko makou hui loea. Pono nā huahana i kaha ʻia me "*" i nā palapala hoʻohui.
Ka hopena
ʻO ka YH1165B-315 lopako ʻenehana e wehewehe hou i ka pono i ka lawelawe ʻana i nā mea kaumaha. ʻO ka hui pū ʻana o ka ikaika, ka wikiwiki, a me ka hoʻololi ʻana he mea nui ia no nā ʻoihana e manaʻo nei e hoʻomāmā i nā hana a hoʻemi i nā kumukūʻai hana. E kelepona mai iā mākou i kēia lā e ʻimi pehea e hiki ai i kēia robot ke hoʻololi i kāu kaʻina hana.






